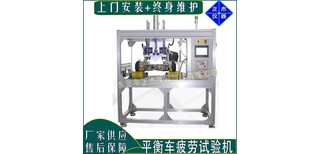
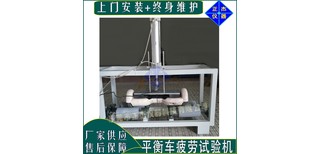
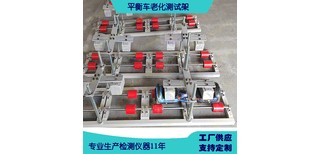
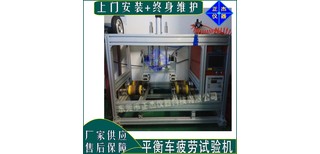
平衡车动态耐久试验机,东莞平衡车测试仪图片


1/6
- ¥5980.00
- 2024-10-31 16:12:27
- 220v
- 回转式
- 平衡车测试仪,电动平衡滑板车寿命试验机,..
- 肖光付 18928297679
- 东莞市正杰仪器科技有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

取消
信息介绍
详细参数
模拟骑行环境:通过的电机驱动系统,模拟出不同速度、加速度和路况(如平坦、颠簸等)下的骑行状态,以全面评估平衡车的性能。
爬坡性能测试
目的:评估轮车在爬坡过程中的动力性能和稳定性。
测试方法:
设计不同坡度和长度的坡道,确保坡度符合安全标准(如不超过20°)。
将轮车置于坡道起点,启动并控制其以不同速度爬坡。
观察并记录轮车爬坡过程中的动力输出、稳定性以及是否能顺利达到坡顶。
评估轮车的爬坡能力,包括大爬坡度、爬坡速度以及爬坡过程中的能耗情况。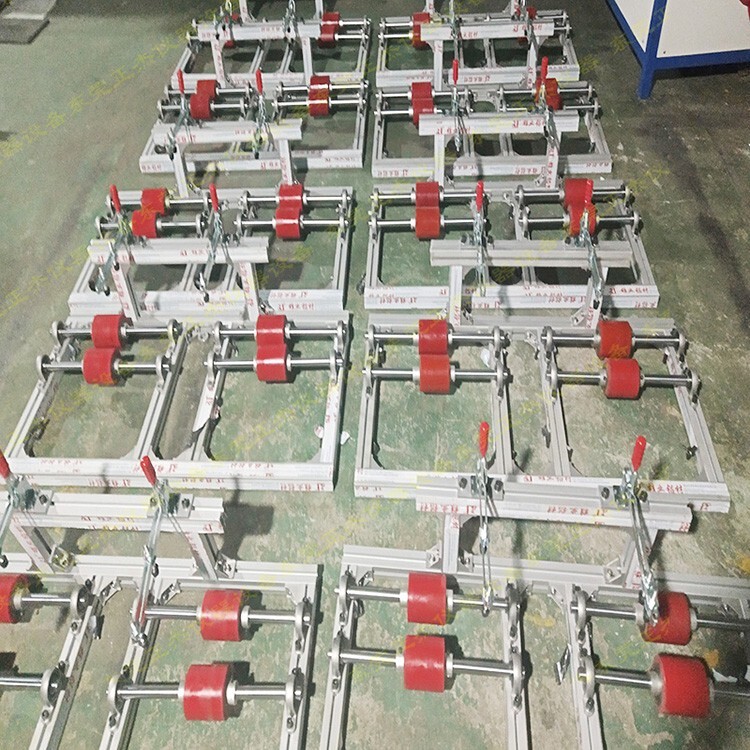
前进、后退平衡测试
目的:验证轮车在前进和后退过程中的平衡控制能力和稳定性。
测试方法:
在平坦且无障碍的场地上,测试轮车的前进和后退功能。
通过改变行驶速度、转向角度以及路面条件(如轻微倾斜的地面),评估轮车的平衡控制能力和稳定性。
观察并记录轮车在前进和后退过程中是否出现晃动、侧翻等不稳定现象。
- 平衡车测试仪,电动平衡滑板车寿命试验机,..
- 耐磨试验机
- 肖光付
- 220v
- 回转式
- 国标
- 高频疲劳试验机
东莞市正杰仪器科技有限公司为你提供的“平衡车动态耐久试验机,东莞平衡车测试仪图片”详细介绍



